About me
Feel free to reach out—I'm always open to new ideas and collaborations.
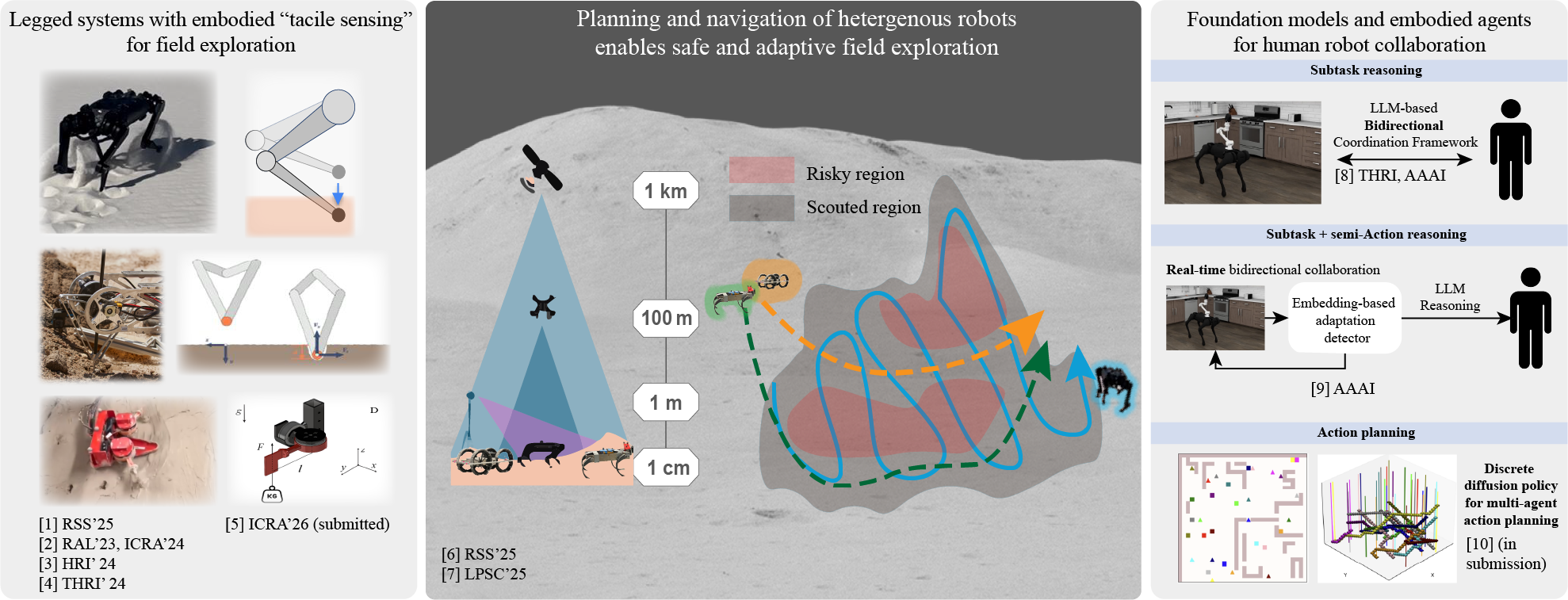
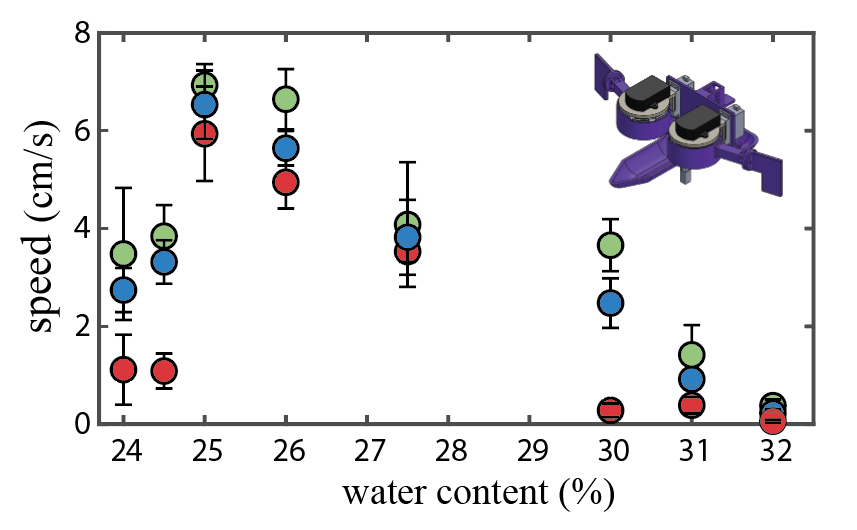
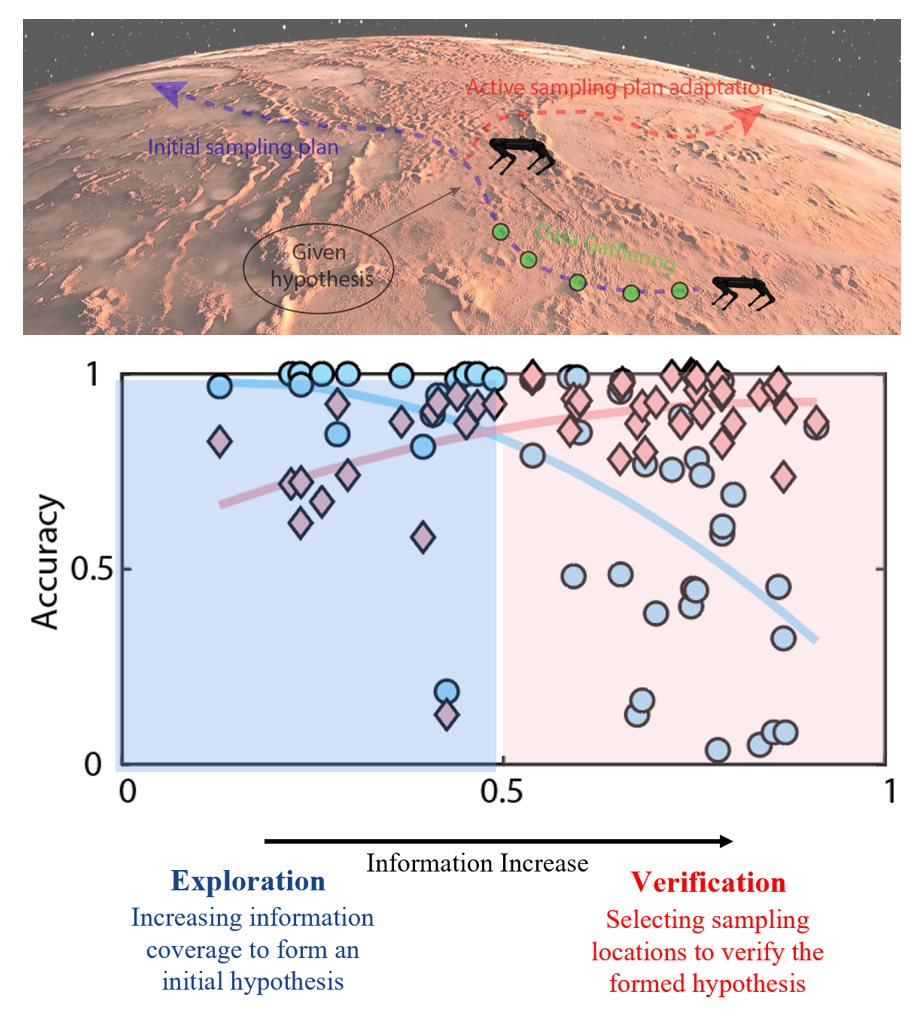
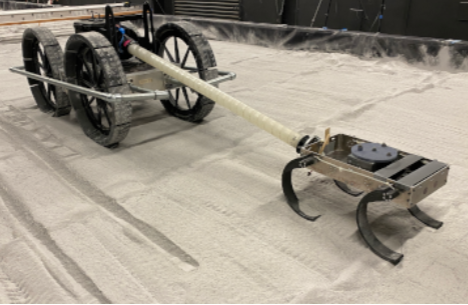
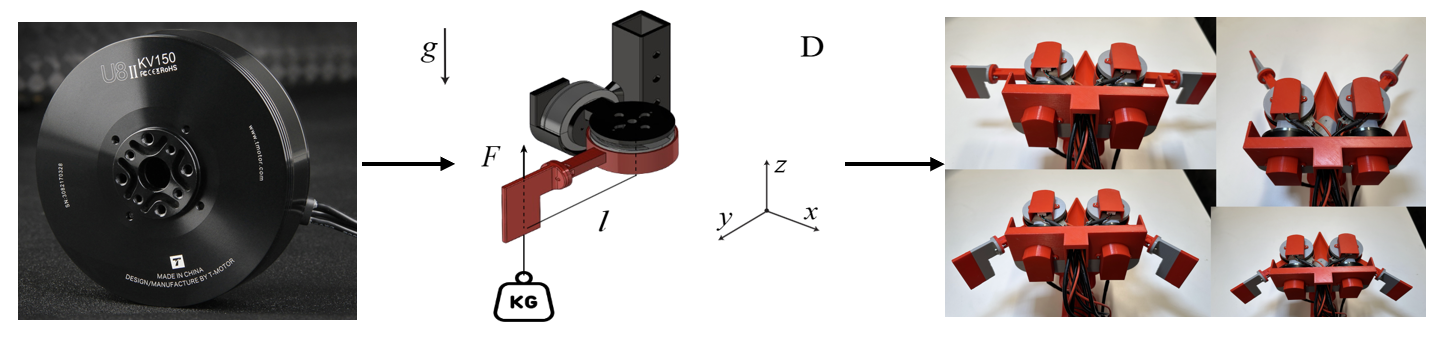
I am a Ph.D. Candidate in RoboLAND at the University of Southern California (USC), advised by Dr. Feifei Qian. I develop direct-drive robots that use legs and bodies as active force sensors, enabling real-time terrain estimation and adaptive navigation beyond vision or LiDAR. My research advances legged robots as environment-aware co-scientists for planetary and Earth exploration, contributing to NASA projects such as LASSIE (Legged geoscience robotic assistant) and TRUSSES (multi-heterogeous robot planning).
I also had the fortune to collaborate and advisded by Dr. Gaurav S. Sukhatme on embodied proactive agents for human-robot teaming, developing foundation model frameworks that manage complex task dependencies and combine fast–slow reasoning so robots can proactively assist humans in real time.
News